













































































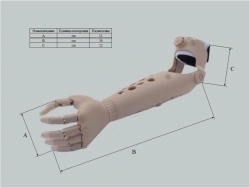
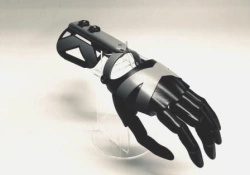
Prosthetic hand with microprocessor control. The prosthesis is designed for partial compensation of congenital or acquired injuries resulting in amputation of upper limbs at the finger/wrist level.
The prosthesis consists of two main parts: hand and forearm. The hand consists of an internal sleeve in which electrodes are optionally installed, finger modules consisting of a gearmotor and kinematic mechanism housed in the finger housing. The forearm consists of an optional inner sleeve made in two variations: with electrodes on the forearm or in the hand, a power system including a battery and power management board, a charging and switching module, a control system, and an outer sleeve. The prosthesis is retained on the residual limb by anatomical features of the residual limb and/or by a tie strap. The prosthesis is controlled by recording an electromyographic signal on the skin surface of the forearm or hand by means of myo-sensors located in the inner sleeve.
















Tell us what you need and get quotes from verified suppliers