




































































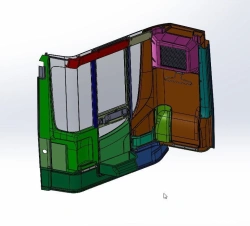









The underwater teleoperated uninhabited apparatus "RB-600" is designed for inspection, research and light underwater technical works at depths up to 300 metres. The equipment is standardly completed with underwater module, cable reel with cable, surface control unit. The underwater module is equipped with high quality video system (front, rear video cameras), powerful light system with smooth intensity control, auto-holding course and depth functions, laser designators.

















أخبرنا بما تحتاجه واحصل على عروض أسعار من موردين موثوقين