













































































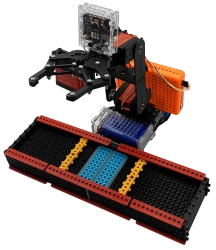
Educational kit for the study of multi-component robotic systems and manipulation robots ""Educational robotics kit "STEM Workshop. Expert set" is intended for studying robotics technologies, basics of information technologies and industrial automation technologies, as well as prototyping and additive manufacturing technologies.
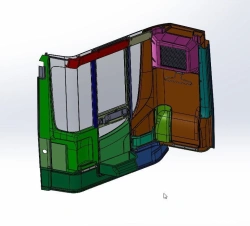
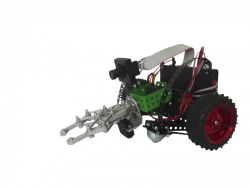
This set is intended for studying the basics of development and construction of models of industrial manipulation robots of various types and autonomous mobile robots. The set includes servomodules, which are models of industrial automated drives with built-in control system. Application of this type of servomodules allows to develop models of manipulation robots with different types of kinematic scheme, having high accuracy and dynamics of movement.














أخبرنا بما تحتاجه واحصل على عروض أسعار من موردين موثوقين